hw
MCB 419 - HW11 - Q-Learning
due Tue Apr 16, 2019, 9:00 PM
email p5js project link to mcb419@gmail.com
Introduction
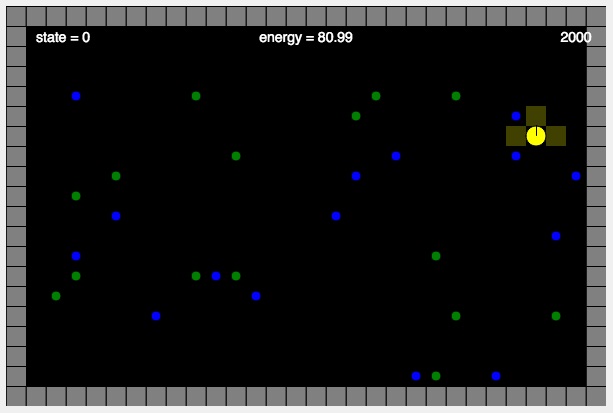
This week we will use a reinforcement learning algorithm (Q-learning) to learn an action policy for a foraging agent. The Q-learning algorithm can be found in the lecture slides. The foraging task takes place in a grid world, as specified below.
Pellets: 15 green (good, reward = +1), 15 blue (bad, reward = -1)
Walls: shown in gray; inpenetrable
Sensors: the bot has 3 sensors (0 = front, 1 = left, 2 = right) indicating what is at that grid location
Sensor values: 0 = nothing, 1 = wall, 2 = good pellet, 3 = bad pellet
Actions: the bot has 3 actions; 0 = move forward, 1 = rotate left 90°, 2 = rotate right 90°
States: correspond to possible combinations of sensor values;
since there are 3 sensors and each sensor has 4 possible values there are 43 = 64 possible states.
State index: the state index (0-63) is computed as 16*sensor[2] + 4*sensor[1] + sensor[0]
Q[state][action]: a 64x3 array for storing learned action values; indexed by state (0-63) and action (0-2)
Instructions
- duplicate the HW11 template file
- follow instructions in the index.html file
- save and submit your project to mcb419@gmail.com with subject: HW11